

 周**:登录了企业版
周**:登录了企业版

 冯**:登录了企业版
冯**:登录了企业版
 陈**:登录了企业版
陈**:使用了ABB-IRB5500-22_Floor-Right机器人
陈**:使用了EFORT-ER10-2000机器人
陈**:使用了EFORT-ER25-1800机器人
陈**:使用了RB1000i-SAD工具
陈**:登录了工厂仿真
陈**:登录了企业版
陈**:使用了ABB-IRB5500-22_Floor-Right机器人
陈**:使用了EFORT-ER10-2000机器人
陈**:使用了EFORT-ER25-1800机器人
陈**:使用了RB1000i-SAD工具
陈**:登录了工厂仿真
 曾**:登录了企业版
曾**:使用了SRT12A-14机器人
黎**:登录了工厂仿真
@**:登录了工厂仿真
@**:使用了ESTUN工作站
曾**:登录了企业版
曾**:使用了SRT12A-14机器人
黎**:登录了工厂仿真
@**:登录了工厂仿真
@**:使用了ESTUN工作站
 陈**:登录了工厂仿真
陈**:使用了ESTUN工作站
陈**:登录了工厂仿真
陈**:使用了ESTUN工作站
 潘**:登录了工厂仿真
潘**:使用了CHL-DS-18工作站
潘**:登录了工厂仿真
潘**:使用了CHL-DS-18工作站
 李**:登录了工厂仿真
李**:登录了工厂仿真
 高**:登录了工厂仿真
高**:登录了竞赛版
高**:使用了ABB-IRB120机器人
高**:使用了CHL-DS-01工作站
高**:使用了CHL-DS-11工作站滑轨(ABB-IRB120)机器人
高**:使用了CHL-JC-11工作站滑轨(ABB-IRB120)机器人
高**:登录了工厂仿真
高**:登录了竞赛版
高**:使用了ABB-IRB120机器人
高**:使用了CHL-DS-01工作站
高**:使用了CHL-DS-11工作站滑轨(ABB-IRB120)机器人
高**:使用了CHL-JC-11工作站滑轨(ABB-IRB120)机器人
 郑**:登录了工厂仿真
郑**:登录了工厂仿真
 M**:登录了工厂仿真
M**:使用了KUKA-KR16-2机器人
M**:使用了数控数字化平台工作站
M**:登录了工厂仿真
M**:使用了KUKA-KR16-2机器人
M**:使用了数控数字化平台工作站
 严**:登录了工厂仿真
严**:使用了CHL-KH11-G3工作站
严**:登录了工厂仿真
严**:使用了CHL-KH11-G3工作站
 王**:登录了工厂仿真
王**:登录了工厂仿真
 张**:登录了工厂仿真
张**:使用了ABB-IRB120机器人
张**:登录了工厂仿真
张**:使用了ABB-IRB120机器人
 ㏑**:登录了工厂仿真
㏑**:登录了工厂仿真
 潇**:登录了工厂仿真
潇**:登录了工厂仿真
 邱**:登录了企业版
卡**:使用了CRP-RA32-20机器人
卡**:使用了CRP-RH21-06-W机器人
邱**:登录了企业版
卡**:使用了CRP-RA32-20机器人
卡**:使用了CRP-RH21-06-W机器人
 李**:登录了工厂仿真
李**:登录了工厂仿真
 T**:登录了工厂仿真
山**:登录了PQArt内核组件
T**:登录了工厂仿真
山**:登录了PQArt内核组件
 张**:登录了工厂仿真
张**:使用了ABB工作站
张**:使用了CHL-KH11(ABB)工作站
常**:登录了企业版
陈**:登录了教育版
j**:登录了工厂仿真
G**:登录了工厂仿真
董**:登录了工厂仿真
董**:使用了CHL-DS-11工作站滑轨(ABB-IRB120)机器人
董**:使用了CHL-JC-11工作站滑轨(ABB-IRB120)机器人
张**:登录了工厂仿真
张**:使用了ABB工作站
张**:使用了CHL-KH11(ABB)工作站
常**:登录了企业版
陈**:登录了教育版
j**:登录了工厂仿真
G**:登录了工厂仿真
董**:登录了工厂仿真
董**:使用了CHL-DS-11工作站滑轨(ABB-IRB120)机器人
董**:使用了CHL-JC-11工作站滑轨(ABB-IRB120)机器人
 陈**:登录了工厂仿真
陈**:登录了企业版
陈**:登录了工厂仿真
陈**:登录了企业版
 温**:登录了工厂仿真
姜**:登录了工厂仿真
温**:登录了工厂仿真
姜**:登录了工厂仿真
 简**:登录了企业版
皮**:登录了企业版
a**:登录了工厂仿真
项**:登录了企业版
J**:登录了工厂仿真
J**:使用了ABB-IRB120机器人
J**:使用了JC设备库
J**:使用了ZJDB设备库
简**:登录了企业版
皮**:登录了企业版
a**:登录了工厂仿真
项**:登录了企业版
J**:登录了工厂仿真
J**:使用了ABB-IRB120机器人
J**:使用了JC设备库
J**:使用了ZJDB设备库
 张**:登录了企业版
郭**:登录了工厂仿真
张**:登录了企业版
郭**:登录了工厂仿真
 申**:登录了企业版
申**:登录了企业版
 石**:登录了工厂仿真
石**:登录了工厂仿真
 陈**:登录了工厂仿真
陈**:使用了CHL-JC04-S-B设备库
陈**:使用了CHL-KH01设备库
陈**:使用了JGZX2设备库
学**:登录了竞赛版
学**:使用了CHL-KH11(ABB)工作站
张**:登录了工厂仿真
张**:使用了ABB工作站
王**:登录了工厂仿真
后**:登录了企业版
S**:登录了工厂仿真
图**:登录了企业版
金**:登录了企业版
徐**:登录了企业版
邹**:登录了工厂仿真
邹**:使用了CHL-DS-18工作站
邹**:使用了CHL-JC-11工作站
邹**:学习了工业机器人集成应用基础课——工业机器人系统集成与应用(虚拟仿真部分)
朱**:登录了教育版
陈**:登录了工厂仿真
陈**:使用了CHL-JC04-S-B设备库
陈**:使用了CHL-KH01设备库
陈**:使用了JGZX2设备库
学**:登录了竞赛版
学**:使用了CHL-KH11(ABB)工作站
张**:登录了工厂仿真
张**:使用了ABB工作站
王**:登录了工厂仿真
后**:登录了企业版
S**:登录了工厂仿真
图**:登录了企业版
金**:登录了企业版
徐**:登录了企业版
邹**:登录了工厂仿真
邹**:使用了CHL-DS-18工作站
邹**:使用了CHL-JC-11工作站
邹**:学习了工业机器人集成应用基础课——工业机器人系统集成与应用(虚拟仿真部分)
朱**:登录了教育版
 任**:登录了工厂仿真
周**:登录了企业版
G**:登录了工厂仿真
任**:登录了工厂仿真
周**:登录了企业版
G**:登录了工厂仿真
 牟**:登录了工厂仿真
王**:使用了CRP-RH18-25/35-HP机器人
刘**:使用了ER10-800-SR 机器人
刘**:使用了ER12B-1510-CE机器人
刘**:使用了ER20B-1760-HI-CE机器人
刘**:使用了ESTUN-ER12B-1510机器人
A**:登录了工厂仿真
申**:登录了工厂仿真
申**:使用了ABB-IRB5500-22_Floor-Left机器人
申**:使用了MOTOMAN-GP20HL机器人
牟**:登录了工厂仿真
王**:使用了CRP-RH18-25/35-HP机器人
刘**:使用了ER10-800-SR 机器人
刘**:使用了ER12B-1510-CE机器人
刘**:使用了ER20B-1760-HI-CE机器人
刘**:使用了ESTUN-ER12B-1510机器人
A**:登录了工厂仿真
申**:登录了工厂仿真
申**:使用了ABB-IRB5500-22_Floor-Left机器人
申**:使用了MOTOMAN-GP20HL机器人
 魏**:登录了工厂仿真
魏**:使用了BX-DLZH-T工具
魏**:使用了CHL-WL-01设备库
j**:登录了工厂仿真
沈**:登录了PQArt内核组件
2**:登录了教育版
常**:登录了企业版
刘**:登录了企业版
长**:登录了企业版
李**:登录了方案版art、factory
陈**:登录了企业版
.**:登录了企业版
魏**:登录了工厂仿真
魏**:使用了BX-DLZH-T工具
魏**:使用了CHL-WL-01设备库
j**:登录了工厂仿真
沈**:登录了PQArt内核组件
2**:登录了教育版
常**:登录了企业版
刘**:登录了企业版
长**:登录了企业版
李**:登录了方案版art、factory
陈**:登录了企业版
.**:登录了企业版
 魏**:登录了工厂仿真
魏**:使用了ABB-IRB1200-7-70机器人
魏**:使用了ABB-IRB120机器人
魏**:使用了OMRON FZ-SC2M设备库
刘**:登录了工厂仿真
刘**:使用了ABB-IRB120机器人
刘**:使用了CHL-KH01设备库
刘**:使用了OMR-SEN-E3Z-LS81-2M设备库
魏**:登录了工厂仿真
魏**:使用了ABB-IRB1200-7-70机器人
魏**:使用了ABB-IRB120机器人
魏**:使用了OMRON FZ-SC2M设备库
刘**:登录了工厂仿真
刘**:使用了ABB-IRB120机器人
刘**:使用了CHL-KH01设备库
刘**:使用了OMR-SEN-E3Z-LS81-2M设备库
 朱**:登录了工厂仿真
朱**:使用了CHL-DS-18工作站
陆**:登录了工厂仿真
周**:使用了Elfin-E05-L机器人
宋**:登录了企业版
朱**:登录了工厂仿真
朱**:使用了CHL-DS-18工作站
陆**:登录了工厂仿真
周**:使用了Elfin-E05-L机器人
宋**:登录了企业版
 杨**:登录了企业版
林**:登录了企业版
T**:使用了BRTIRUS0805A机器人
T**:使用了BRTIRUS1510A(New)机器人
T**:使用了BRTIRUS1820A机器人
T**:使用了BRTIRUS2110A机器人
张**:登录了教育版
酷**:登录了企业版
酷**:使用了S12-125-G2机器人
酷**:使用了S16-98-G2机器人
杨**:登录了企业版
林**:登录了企业版
T**:使用了BRTIRUS0805A机器人
T**:使用了BRTIRUS1510A(New)机器人
T**:使用了BRTIRUS1820A机器人
T**:使用了BRTIRUS2110A机器人
张**:登录了教育版
酷**:登录了企业版
酷**:使用了S12-125-G2机器人
酷**:使用了S16-98-G2机器人
 邢**:登录了企业版
邵**:登录了工厂仿真
贺**:登录了工厂仿真
贺**:使用了ZJDB设备库
其**:登录了工厂仿真
付**:登录了工厂仿真
邵**:登录了埃夫特专属版
邢**:登录了企业版
邵**:登录了工厂仿真
贺**:登录了工厂仿真
贺**:使用了ZJDB设备库
其**:登录了工厂仿真
付**:登录了工厂仿真
邵**:登录了埃夫特专属版
 鲨**:登录了工厂仿真
鲨**:使用了ABB-IRB120机器人
鲨**:使用了CHL-ZH-1901-BBZ13设备库
埃**:使用了ER20B-1760-HI-CE机器人
王**:登录了工厂仿真
鲨**:登录了工厂仿真
鲨**:使用了ABB-IRB120机器人
鲨**:使用了CHL-ZH-1901-BBZ13设备库
埃**:使用了ER20B-1760-HI-CE机器人
王**:登录了工厂仿真
 湘**:登录了工厂仿真
三**:登录了三奥专业版
培**:登录了工厂仿真
张**:登录了工厂仿真
a**:使用了ER20-1000-SR-HI-CE机器人
a**:使用了U型双轴变位机300KG机器人
西**:登录了企业版
西**:使用了KUKA-KR270-R3100-2 K机器人
刘**:登录了企业版
刘**:学习了PQArt工业项目实例讲解
酷**:登录了企业版
酷**:使用了S20-180-G2机器人
湘**:登录了工厂仿真
三**:登录了三奥专业版
培**:登录了工厂仿真
张**:登录了工厂仿真
a**:使用了ER20-1000-SR-HI-CE机器人
a**:使用了U型双轴变位机300KG机器人
西**:登录了企业版
西**:使用了KUKA-KR270-R3100-2 K机器人
刘**:登录了企业版
刘**:学习了PQArt工业项目实例讲解
酷**:登录了企业版
酷**:使用了S20-180-G2机器人
 何**:登录了工厂仿真
s**:登录了教育版
s**:使用了ABB-IRB120机器人
西**:登录了企业版
S**:登录了工厂仿真
S**:使用了CHL-DS-18工作站
何**:登录了工厂仿真
s**:登录了教育版
s**:使用了ABB-IRB120机器人
西**:登录了企业版
S**:登录了工厂仿真
S**:使用了CHL-DS-18工作站
 刘**:登录了工厂仿真
刘**:使用了ABB-IRB1600-10-145机器人
刘**:使用了JC设备库
刘**:使用了OMRON FZ-SC2M设备库
刘**:使用了ZJDB设备库
刘**:使用了ZP设备库
Y**:登录了企业版
Y**:使用了数控数字化平台工作站
培**:登录了工厂仿真
企**:登录了企业版
企**:使用了ABB-IRB120机器人
山**:登录了PQArt内核组件
要**:登录了工厂仿真
张**:登录了工厂仿真
欧**:登录了企业版
刘**:登录了工厂仿真
刘**:使用了ABB-IRB1600-10-145机器人
刘**:使用了JC设备库
刘**:使用了OMRON FZ-SC2M设备库
刘**:使用了ZJDB设备库
刘**:使用了ZP设备库
Y**:登录了企业版
Y**:使用了数控数字化平台工作站
培**:登录了工厂仿真
企**:登录了企业版
企**:使用了ABB-IRB120机器人
山**:登录了PQArt内核组件
要**:登录了工厂仿真
张**:登录了工厂仿真
欧**:登录了企业版
 张**:登录了工厂仿真
孙**:登录了工厂仿真
卡**:使用了CRP-RA32-20机器人
卡**:使用了CRP-RH21-06-W机器人
卡**:使用了CRP-RS10-20Z40机器人
张**:登录了工厂仿真
孙**:登录了工厂仿真
卡**:使用了CRP-RA32-20机器人
卡**:使用了CRP-RH21-06-W机器人
卡**:使用了CRP-RS10-20Z40机器人
 刘**:登录了工厂仿真
杜**:登录了工厂仿真
杜**:使用了CHL-JC-11-A工作站
杜**:学习了PQArt基本功能视频讲解(教学实训项目任务详解)
德**:登录了德屹智能专机
西**:登录了PQArt内核组件
远**:登录了企业版
刘**:登录了工厂仿真
杜**:登录了工厂仿真
杜**:使用了CHL-JC-11-A工作站
杜**:学习了PQArt基本功能视频讲解(教学实训项目任务详解)
德**:登录了德屹智能专机
西**:登录了PQArt内核组件
远**:登录了企业版
 柳**:登录了工厂仿真
柳**:登录了工厂仿真
 在**:登录了企业版
杭**:登录了工厂仿真
杭**:使用了CHL-DS-18工作站
汪**:登录了企业版
徐**:登录了企业版
徐**:使用了INOVANCE-IR-R4-56S5机器人
西**:登录了企业版
在**:登录了企业版
杭**:登录了工厂仿真
杭**:使用了CHL-DS-18工作站
汪**:登录了企业版
徐**:登录了企业版
徐**:使用了INOVANCE-IR-R4-56S5机器人
西**:登录了企业版
 张**:登录了企业版
张**:使用了CHL-HL12工作站
张**:使用了CHL-WL-01R工作站
张**:使用了ROKAE-xMate CR12 R1300(手腕缩短)机器人
张**:使用了ROKAE-xMate CR12 R1300机器人
张**:使用了智能仓储单元 3D工作站
张**:登录了企业版
张**:使用了CHL-HL12工作站
张**:使用了CHL-WL-01R工作站
张**:使用了ROKAE-xMate CR12 R1300(手腕缩短)机器人
张**:使用了ROKAE-xMate CR12 R1300机器人
张**:使用了智能仓储单元 3D工作站
 公**:登录了工厂仿真
公**:使用了ADT-AR4215机器人
公**:使用了CHL-DS-18工作站
公**:使用了CHL-KH11-G2工作站
公**:登录了工厂仿真
公**:使用了ADT-AR4215机器人
公**:使用了CHL-DS-18工作站
公**:使用了CHL-KH11-G2工作站
 刘**:学习了四川省“华航唯实杯”机器人虚拟仿真大赛
S**:登录了工厂仿真
S**:使用了CHL-DS-11设备库
S**:使用了CHL-JC04-S-B设备库
葱**:登录了工厂仿真
陈**:使用了INOVANCE-IR-S35-100Z42S5机器人
刘**:学习了四川省“华航唯实杯”机器人虚拟仿真大赛
S**:登录了工厂仿真
S**:使用了CHL-DS-11设备库
S**:使用了CHL-JC04-S-B设备库
葱**:登录了工厂仿真
陈**:使用了INOVANCE-IR-S35-100Z42S5机器人
 .**:登录了工厂仿真
刘**:登录了工厂仿真
.**:登录了工厂仿真
刘**:登录了工厂仿真
 聂**:登录了工厂仿真
聂**:登录了工厂仿真
 方**:登录了企业版
方**:登录了企业版
 夏**:学习了智能传感与智能检测技术
夏**:学习了智能传感与智能检测技术
 王**:登录了工厂仿真
王**:登录了工厂仿真
 高**:登录了工厂仿真
高**:使用了CHL-JC-02-A-B(演示)工作站
高**:登录了工厂仿真
高**:使用了CHL-JC-02-A-B(演示)工作站
 李**:登录了企业版
沈**:登录了工厂仿真
何**:使用了INOVANCE-IR-R10H-120S5机器人
何**:使用了INOVANCE-IR-R4H-54S5机器人
何**:使用了INOVANCE-IRS111-10-80Z30TS3机器人
何**:使用了INOVANCE-IR-S20-100Z42S3机器人
何**:使用了INOVANCE-IR-S4-40Z15S3机器人
孙**:使用了ER220B-2650机器人
蔡**:登录了工厂仿真
李**:登录了企业版
沈**:登录了工厂仿真
何**:使用了INOVANCE-IR-R10H-120S5机器人
何**:使用了INOVANCE-IR-R4H-54S5机器人
何**:使用了INOVANCE-IRS111-10-80Z30TS3机器人
何**:使用了INOVANCE-IR-S20-100Z42S3机器人
何**:使用了INOVANCE-IR-S4-40Z15S3机器人
孙**:使用了ER220B-2650机器人
蔡**:登录了工厂仿真
 曾**:登录了工厂仿真
任**:登录了工厂仿真
任**:使用了CHL-WL-01设备库
曾**:登录了工厂仿真
任**:登录了工厂仿真
任**:使用了CHL-WL-01设备库
 史**:登录了工厂仿真
董**:登录了工厂仿真
s**:登录了工厂仿真
史**:登录了工厂仿真
董**:登录了工厂仿真
s**:登录了工厂仿真
 吴**:登录了企业版
吴**:登录了企业版
 魏**:登录了工厂仿真
魏**:使用了ABB-IRB120机器人
魏**:使用了CHL-JC-11-A工作站
魏**:使用了CHL-JC-11工作站
魏**:登录了工厂仿真
魏**:使用了ABB-IRB120机器人
魏**:使用了CHL-JC-11-A工作站
魏**:使用了CHL-JC-11工作站
 胡**:登录了企业版
胡**:登录了企业版
 王**:登录了沪钧机电专业版
张**:登录了工厂仿真
王**:登录了沪钧机电专业版
张**:登录了工厂仿真
 夏**:登录了教育版
夏**:使用了KUKA-KR16-2机器人
夏**:登录了教育版
夏**:使用了KUKA-KR16-2机器人
 刘**:登录了企业版
李**:登录了德屹智能专机
李**:使用了Estun-ER600-2800机器人
谭**:使用了CHL-DS-11设备库
谭**:使用了INOVANCE-IR-R220-270S7机器人
郭**:登录了工厂仿真
刘**:登录了企业版
李**:登录了德屹智能专机
李**:使用了Estun-ER600-2800机器人
谭**:使用了CHL-DS-11设备库
谭**:使用了INOVANCE-IR-R220-270S7机器人
郭**:登录了工厂仿真
 一**:登录了工厂仿真
H**:登录了企业版
h**:登录了工厂仿真
方**:使用了INOVANCE-IR-R7H-90S5机器人
刘**:登录了教育版
刘**:使用了ABB-IRB2400_16-155机器人
刘**:使用了BT240-3KW工具
王**:登录了工厂仿真
一**:登录了工厂仿真
H**:登录了企业版
h**:登录了工厂仿真
方**:使用了INOVANCE-IR-R7H-90S5机器人
刘**:登录了教育版
刘**:使用了ABB-IRB2400_16-155机器人
刘**:使用了BT240-3KW工具
王**:登录了工厂仿真
 李**:登录了工厂仿真
李**:登录了工厂仿真
 �**:登录了工厂仿真
ᠰ**:登录了教育版
ᠰ**:使用了CHL-DS-11工作站
m**:登录了工厂仿真
m**:使用了CHL-KH11-G4工作站
�**:登录了工厂仿真
ᠰ**:登录了教育版
ᠰ**:使用了CHL-DS-11工作站
m**:登录了工厂仿真
m**:使用了CHL-KH11-G4工作站
 曾**:登录了工厂仿真
曾**:登录了工厂仿真
 天**:学习了2023年“华航杯”工业机器人虚拟仿真竞赛
天**:学习了PQArt实用技能特训营6月录播回放
天**:学习了山东省“华航唯实杯”机器人虚拟仿真大赛 (10月17日举行)
天**:学习了四川省“华航唯实杯”机器人虚拟仿真大赛
s**:登录了竞赛版
天**:学习了2023年“华航杯”工业机器人虚拟仿真竞赛
天**:学习了PQArt实用技能特训营6月录播回放
天**:学习了山东省“华航唯实杯”机器人虚拟仿真大赛 (10月17日举行)
天**:学习了四川省“华航唯实杯”机器人虚拟仿真大赛
s**:登录了竞赛版
 刘**:使用了TOPSTAR-TRH005-800-200机器人
范**:登录了企业版
许**:登录了工厂仿真
刘**:使用了TOPSTAR-TRH005-800-200机器人
范**:登录了企业版
许**:登录了工厂仿真
 张**:登录了工厂仿真
张**:登录了工厂仿真
 古**:登录了工厂仿真
陈**:登录了企业版
陈**:使用了MOTOMAN-GP8机器人
曹**:登录了工厂仿真
曹**:使用了ABB-IRBP A-750_D1450-H900机器人
曹**:使用了KUKA-KR16-2机器人
曹**:使用了KUKA-KR6-R1820-arc-HW机器人
曹**:使用了LaserTool工具
晚**:登录了工厂仿真
晚**:使用了CHL-DS-11设备库
晚**:使用了CHL-DS-18工作站
晚**:使用了CHL-WL-01设备库
何**:登录了企业版
何**:使用了KUKA-KR210-R2700-2机器人
刘**:登录了企业版
刘**:使用了ABB-IRB120机器人
刘**:使用了KUKA-KR16-2机器人
刘**:登录了工厂仿真
刘**:使用了CHL-JC-11工作站
古**:登录了工厂仿真
陈**:登录了企业版
陈**:使用了MOTOMAN-GP8机器人
曹**:登录了工厂仿真
曹**:使用了ABB-IRBP A-750_D1450-H900机器人
曹**:使用了KUKA-KR16-2机器人
曹**:使用了KUKA-KR6-R1820-arc-HW机器人
曹**:使用了LaserTool工具
晚**:登录了工厂仿真
晚**:使用了CHL-DS-11设备库
晚**:使用了CHL-DS-18工作站
晚**:使用了CHL-WL-01设备库
何**:登录了企业版
何**:使用了KUKA-KR210-R2700-2机器人
刘**:登录了企业版
刘**:使用了ABB-IRB120机器人
刘**:使用了KUKA-KR16-2机器人
刘**:登录了工厂仿真
刘**:使用了CHL-JC-11工作站
 郭**:登录了工厂仿真
侯**:登录了竞赛版
侯**:使用了CHL-DS-18工作站
毕**:登录了工厂仿真
陈**:登录了工厂仿真
陈**:使用了CHL-DS-18工作站
曹**:登录了工厂仿真
罗**:使用了ABB-IRB6650S_ExAxis_21m机器人
郭**:登录了工厂仿真
侯**:登录了竞赛版
侯**:使用了CHL-DS-18工作站
毕**:登录了工厂仿真
陈**:登录了工厂仿真
陈**:使用了CHL-DS-18工作站
曹**:登录了工厂仿真
罗**:使用了ABB-IRB6650S_ExAxis_21m机器人
 张**:登录了工厂仿真
张**:使用了ABB-IRB120机器人
常**:登录了PQLaser三维激光切割编程软件
常**:使用了CRP-RA18-20-J 机器人
常**:使用了CRP-RA18-25机器人
张**:登录了工厂仿真
张**:使用了ABB-IRB120机器人
常**:登录了PQLaser三维激光切割编程软件
常**:使用了CRP-RA18-20-J 机器人
常**:使用了CRP-RA18-25机器人
 刘**:登录了PQArt内核组件
刘**:登录了PQArt内核组件
 巩**:登录了工厂仿真
巩**:使用了CHL-JC04-S-B设备库
巩**:使用了CHL-KH01设备库
文**:登录了企业版
贾**:登录了工厂仿真
贾**:使用了CHL-KH11-G4工作站
贾**:使用了智能仓储单元 3D工作站
9**:使用了CRP-RP18-25机器人
吴**:登录了工厂仿真
A**:登录了教育版
亢**:登录了企业版
成**:登录了PQArt内核组件
巩**:登录了工厂仿真
巩**:使用了CHL-JC04-S-B设备库
巩**:使用了CHL-KH01设备库
文**:登录了企业版
贾**:登录了工厂仿真
贾**:使用了CHL-KH11-G4工作站
贾**:使用了智能仓储单元 3D工作站
9**:使用了CRP-RP18-25机器人
吴**:登录了工厂仿真
A**:登录了教育版
亢**:登录了企业版
成**:登录了PQArt内核组件
 马**:登录了工厂仿真
马**:登录了工厂仿真
 。**:登录了工厂仿真
汤**:登录了工厂仿真
。**:登录了工厂仿真
汤**:登录了工厂仿真
 王**:登录了工厂仿真
王**:登录了工厂仿真
 吴**:登录了工厂仿真
吴**:登录了工厂仿真
 Y**:登录了工厂仿真
Y**:登录了竞赛版
Y**:使用了ABB-IRB120机器人
Y**:使用了conveyor-217设备库
Y**:登录了工厂仿真
Y**:登录了竞赛版
Y**:使用了ABB-IRB120机器人
Y**:使用了conveyor-217设备库
 李**:登录了工厂仿真
李**:使用了CHL-KH11(EFORT)工作站
李**:使用了CHL-KH11(STEP)工作站
李**:使用了ToolB工具
西**:登录了企业版
西**:使用了KUKA-KR270-R3100-2 K机器人
张**:登录了工厂仿真
翟**:登录了工厂仿真
李**:登录了工厂仿真
李**:使用了CHL-KH11(EFORT)工作站
李**:使用了CHL-KH11(STEP)工作站
李**:使用了ToolB工具
西**:登录了企业版
西**:使用了KUKA-KR270-R3100-2 K机器人
张**:登录了工厂仿真
翟**:登录了工厂仿真
 5**:登录了工厂仿真
中**:登录了企业版
天**:登录了埃夫特专属版
天**:使用了EFORT-ARC12-2000机器人
山**:使用了CRP-RH14-10-W机器人
刘**:登录了工厂仿真
刘**:使用了CHL-DS-11设备库
5**:登录了工厂仿真
中**:登录了企业版
天**:登录了埃夫特专属版
天**:使用了EFORT-ARC12-2000机器人
山**:使用了CRP-RH14-10-W机器人
刘**:登录了工厂仿真
刘**:使用了CHL-DS-11设备库
 刘**:登录了工厂仿真
刘**:登录了竞赛版
刘**:使用了CHL-DS-11轮毂打磨工作站
刘**:使用了CHL-JC-11-A工作站
刘**:使用了CHL-KH11-C1工作站
刘**:使用了CHL-KH11-G1工作站
刘**:使用了CHL-KH11-G2工作站
刘**:使用了LTCC设备库
刘**:使用了智能仓储单元 3D工作站
周**:登录了企业版
刘**:登录了工厂仿真
刘**:登录了竞赛版
刘**:使用了CHL-DS-11轮毂打磨工作站
刘**:使用了CHL-JC-11-A工作站
刘**:使用了CHL-KH11-C1工作站
刘**:使用了CHL-KH11-G1工作站
刘**:使用了CHL-KH11-G2工作站
刘**:使用了LTCC设备库
刘**:使用了智能仓储单元 3D工作站
周**:登录了企业版
 高**:登录了工厂仿真
高**:使用了AITRON-AT120R2230E(002)机器人
A**:登录了工厂仿真
c**:登录了工厂仿真
c**:使用了ABB-IRB120机器人
c**:使用了INOVANCE-IR-R80-210S5机器人
高**:登录了工厂仿真
高**:使用了AITRON-AT120R2230E(002)机器人
A**:登录了工厂仿真
c**:登录了工厂仿真
c**:使用了ABB-IRB120机器人
c**:使用了INOVANCE-IR-R80-210S5机器人
 鲍**:登录了工厂仿真
雷**:登录了PQLaser三维激光切割编程软件
滕**:登录了工厂仿真
杨**:登录了PQArt内核组件
鲍**:登录了工厂仿真
雷**:登录了PQLaser三维激光切割编程软件
滕**:登录了工厂仿真
杨**:登录了PQArt内核组件
 爱**:登录了工厂仿真
爱**:使用了CHL-DS-18工作站
爱**:学习了工业机器人集成应用基础课——工业机器人系统集成与应用(虚拟仿真部分)
沈**:登录了企业版
沈**:使用了JAKA_PRO_16机器人
沈**:使用了JAKA-Zu-7机器人
爱**:登录了工厂仿真
爱**:使用了CHL-DS-18工作站
爱**:学习了工业机器人集成应用基础课——工业机器人系统集成与应用(虚拟仿真部分)
沈**:登录了企业版
沈**:使用了JAKA_PRO_16机器人
沈**:使用了JAKA-Zu-7机器人
 费**:登录了工厂仿真
马**:登录了工厂仿真
常**:登录了企业版
费**:登录了工厂仿真
马**:登录了工厂仿真
常**:登录了企业版
 候**:登录了工厂仿真
王**:登录了企业版
何**:登录了工厂仿真
西**:登录了企业版
A**:使用了500x500x500设备库
候**:登录了工厂仿真
王**:登录了企业版
何**:登录了工厂仿真
西**:登录了企业版
A**:使用了500x500x500设备库
 孙**:登录了企业版
S**:登录了工厂仿真
S**:使用了ABB-IRB1200-7-70机器人
S**:使用了ABB-IRB920T_6kg-650-180-STD机器人
S**:使用了HXCC设备库
S**:使用了LTCC设备库
S**:使用了OMRON E2B-M30KN20-WZ-B1设备库
S**:使用了OMR-SEN-E3Z-LS81-2M设备库
S**:使用了TOPSTAR-TR005-HP800机器人
S**:学习了PQArt实用功能视频讲解
彭**:登录了工厂仿真
彭**:使用了CHL-DS-18工作站
s**:登录了工厂仿真
肖**:登录了工厂仿真
常**:登录了企业版
孙**:登录了企业版
S**:登录了工厂仿真
S**:使用了ABB-IRB1200-7-70机器人
S**:使用了ABB-IRB920T_6kg-650-180-STD机器人
S**:使用了HXCC设备库
S**:使用了LTCC设备库
S**:使用了OMRON E2B-M30KN20-WZ-B1设备库
S**:使用了OMR-SEN-E3Z-LS81-2M设备库
S**:使用了TOPSTAR-TR005-HP800机器人
S**:学习了PQArt实用功能视频讲解
彭**:登录了工厂仿真
彭**:使用了CHL-DS-18工作站
s**:登录了工厂仿真
肖**:登录了工厂仿真
常**:登录了企业版
 刘**:使用了AUBO-i5机器人
a**:使用了AUBO-i10机器人
a**:使用了AUBO-i20机器人
a**:使用了AUBO-i5机器人
刘**:使用了AUBO-i5机器人
a**:使用了AUBO-i10机器人
a**:使用了AUBO-i20机器人
a**:使用了AUBO-i5机器人
 郝**:使用了BRTIRUS1820A机器人
郝**:使用了BRTIRWD1506A(+卡诺普控制器)机器人
郝**:使用了LaserTool工具
南**:登录了企业版
南**:使用了ERW500H ECO-22工具
长**:登录了PQArt内核组件
华**:登录了PQArt内核组件
郝**:使用了BRTIRUS1820A机器人
郝**:使用了BRTIRWD1506A(+卡诺普控制器)机器人
郝**:使用了LaserTool工具
南**:登录了企业版
南**:使用了ERW500H ECO-22工具
长**:登录了PQArt内核组件
华**:登录了PQArt内核组件
 毛**:登录了工厂仿真
毛**:使用了ABB-IRB120机器人
毛**:使用了LTCC设备库
王**:登录了工厂仿真
测**:登录了企业版
张**:使用了INOVANCE-IR-GS60-120Z40S5机器人
d**:登录了企业版
李**:登录了企业版
朱**:登录了企业版
吕**:登录了企业版
檀**:登录了企业版
檀**:使用了ABB工作站
檀**:使用了FANUC-R-2000iC-165F机器人
于**:使用了INOVANCE-IR-R7H-70S5机器人
蔡**:登录了工厂仿真
蔡**:使用了CHL-DS-11工作站
蔡**:使用了CHL-DS-18工作站
快**:登录了工厂仿真
常**:登录了企业版
毛**:登录了工厂仿真
毛**:使用了ABB-IRB120机器人
毛**:使用了LTCC设备库
王**:登录了工厂仿真
测**:登录了企业版
张**:使用了INOVANCE-IR-GS60-120Z40S5机器人
d**:登录了企业版
李**:登录了企业版
朱**:登录了企业版
吕**:登录了企业版
檀**:登录了企业版
檀**:使用了ABB工作站
檀**:使用了FANUC-R-2000iC-165F机器人
于**:使用了INOVANCE-IR-R7H-70S5机器人
蔡**:登录了工厂仿真
蔡**:使用了CHL-DS-11工作站
蔡**:使用了CHL-DS-18工作站
快**:登录了工厂仿真
常**:登录了企业版
 胡**:登录了工厂仿真
韩**:登录了工厂仿真
韩**:使用了CHL-DS-18工作站
华**:登录了PQArt内核组件
孙**:登录了企业版
林**:登录了工厂仿真
p**:登录了教育版
李**:登录了企业版
航**:登录了PQArt内核组件
培**:登录了工厂仿真
上**:登录了PQArt内核组件
华**:登录了PQArt内核组件
华**:使用了KUKA-KR16-2机器人
胡**:登录了工厂仿真
韩**:登录了工厂仿真
韩**:使用了CHL-DS-18工作站
华**:登录了PQArt内核组件
孙**:登录了企业版
林**:登录了工厂仿真
p**:登录了教育版
李**:登录了企业版
航**:登录了PQArt内核组件
培**:登录了工厂仿真
上**:登录了PQArt内核组件
华**:登录了PQArt内核组件
华**:使用了KUKA-KR16-2机器人
 景**:登录了工厂仿真
景**:使用了CHL-DS-18工作站
x**:登录了企业版
景**:登录了工厂仿真
景**:使用了CHL-DS-18工作站
x**:登录了企业版
 张**:登录了企业版
刘**:登录了工厂仿真
刘**:使用了CHL-WL-01设备库
刘**:使用了STK0840PCP03设备库
刘**:使用了ZJDB设备库
宋**:登录了企业版
张**:登录了企业版
刘**:登录了工厂仿真
刘**:使用了CHL-WL-01设备库
刘**:使用了STK0840PCP03设备库
刘**:使用了ZJDB设备库
宋**:登录了企业版
 睿**:登录了工厂仿真
睿**:登录了工厂仿真
 张**:登录了工厂仿真
M**:使用了TURIN-TKB1440机器人
西**:登录了PQArt内核组件
杨**:登录了企业版
李**:使用了CRP-RA09-12T3机器人
李**:使用了CRP-RP32-180 机器人
S**:登录了工厂仿真
张**:登录了工厂仿真
M**:使用了TURIN-TKB1440机器人
西**:登录了PQArt内核组件
杨**:登录了企业版
李**:使用了CRP-RA09-12T3机器人
李**:使用了CRP-RP32-180 机器人
S**:登录了工厂仿真
 代**:登录了教育版
代**:登录了竞赛版
代**:使用了CHL-KH01工作站
Z**:登录了工厂仿真
Z**:使用了1000x1000x1000设备库
代**:登录了教育版
代**:登录了竞赛版
代**:使用了CHL-KH01工作站
Z**:登录了工厂仿真
Z**:使用了1000x1000x1000设备库
 虞**:登录了企业版
虞**:登录了企业版
 张**:登录了PQTWINS
张**:登录了工厂仿真
张**:登录了企业版
张**:使用了ABB工作站
张**:登录了PQTWINS
张**:登录了工厂仿真
张**:登录了企业版
张**:使用了ABB工作站
 黄**:登录了工厂仿真
李**:登录了工厂仿真
李**:使用了CHL-DS-11设备库
李**:使用了CHL-WL-01设备库
黄**:登录了工厂仿真
李**:登录了工厂仿真
李**:使用了CHL-DS-11设备库
李**:使用了CHL-WL-01设备库
 汪**:登录了工厂仿真
汪**:使用了鼠标装配工序模拟工作站
叶**:登录了企业版
汪**:登录了工厂仿真
汪**:使用了鼠标装配工序模拟工作站
叶**:登录了企业版
 彭**:登录了教育版
彭**:使用了JC设备库
彭**:使用了JGZX2设备库
彭**:使用了ZJDB设备库
彭**:使用了ZP设备库
段**:登录了工厂仿真
彭**:登录了教育版
彭**:使用了JC设备库
彭**:使用了JGZX2设备库
彭**:使用了ZJDB设备库
彭**:使用了ZP设备库
段**:登录了工厂仿真
 张**:登录了工厂仿真
张**:登录了工厂仿真
 汪**:登录了工厂仿真
汪**:使用了CHL-KH11-G4工作站
汪**:使用了HXCC设备库
常**:登录了企业版
汪**:登录了工厂仿真
汪**:使用了CHL-KH11-G4工作站
汪**:使用了HXCC设备库
常**:登录了企业版
 王**:登录了PQArt内核组件
王**:登录了企业版
王**:登录了PQArt内核组件
王**:登录了企业版
 咖**:登录了工厂仿真
安**:登录了工厂仿真
安**:使用了CHL-DS-18工作站
咖**:登录了工厂仿真
安**:登录了工厂仿真
安**:使用了CHL-DS-18工作站
 我**:登录了企业版
j**:登录了工厂仿真
长**:登录了PQArt内核组件
福**:登录了竞赛版
福**:使用了CHL-DS-01工作站
张**:使用了CRP-RH14-10机器人
荔**:登录了企业版
长**:登录了企业版
张**:登录了企业版
康**:登录了工厂仿真
胡**:使用了INOVANCE-IR-R16-210S5机器人
我**:登录了企业版
j**:登录了工厂仿真
长**:登录了PQArt内核组件
福**:登录了竞赛版
福**:使用了CHL-DS-01工作站
张**:使用了CRP-RH14-10机器人
荔**:登录了企业版
长**:登录了企业版
张**:登录了企业版
康**:登录了工厂仿真
胡**:使用了INOVANCE-IR-R16-210S5机器人
 梁**:登录了工厂仿真
梁**:使用了CHL-DS-18工作站
梁**:登录了工厂仿真
梁**:使用了CHL-DS-18工作站
 吴**:登录了工厂仿真
吴**:登录了工厂仿真
 孙**:登录了埃夫特专属版
程**:使用了AUBO-i3机器人
程**:使用了AUBO-i5机器人
程**:使用了AUBO-iS20L机器人
程**:使用了AUBO-S2-DRW_DH机器人
魏**:登录了工厂仿真
魏**:使用了ABB-IRB1200-5-90机器人
魏**:使用了ABB-IRB120机器人
魏**:使用了CHL-GV-01T设备库
魏**:使用了CHL-KH11设备库
魏**:使用了CHL-WL-01设备库
魏**:使用了OMR-SEN-E3Z-LS81-2M设备库
孙**:登录了埃夫特专属版
程**:使用了AUBO-i3机器人
程**:使用了AUBO-i5机器人
程**:使用了AUBO-iS20L机器人
程**:使用了AUBO-S2-DRW_DH机器人
魏**:登录了工厂仿真
魏**:使用了ABB-IRB1200-5-90机器人
魏**:使用了ABB-IRB120机器人
魏**:使用了CHL-GV-01T设备库
魏**:使用了CHL-KH11设备库
魏**:使用了CHL-WL-01设备库
魏**:使用了OMR-SEN-E3Z-LS81-2M设备库
 x**:登录了工厂仿真
王**:登录了工厂仿真
x**:登录了工厂仿真
王**:登录了工厂仿真
 李**:登录了工厂仿真
詹**:登录了埃夫特专属版
李**:登录了工厂仿真
詹**:登录了埃夫特专属版
 陈**:登录了工厂仿真
陈**:登录了企业版
陈**:登录了工厂仿真
陈**:登录了企业版
 于**:登录了工厂仿真
于**:登录了企业版
于**:使用了ESTUN-ER160B-3200机器人
于**:使用了焊接转台(1R)机器人
张**:登录了PQArt内核组件
序**:登录了工厂仿真
贾**:登录了企业版
F**:登录了工厂仿真
S**:登录了工厂仿真
王**:登录了企业版
王**:使用了KUKA-KR210-R2700-2机器人
闻**:登录了PQArt内核组件
高**:使用了INOVANCE-IR-R7H-70S5机器人
高**:使用了INOVANCE-IR-S35-80Z42S5机器人
硬**:登录了PQPanel板材切割编程软件
王**:登录了工厂仿真
于**:登录了工厂仿真
于**:登录了企业版
于**:使用了ESTUN-ER160B-3200机器人
于**:使用了焊接转台(1R)机器人
张**:登录了PQArt内核组件
序**:登录了工厂仿真
贾**:登录了企业版
F**:登录了工厂仿真
S**:登录了工厂仿真
王**:登录了企业版
王**:使用了KUKA-KR210-R2700-2机器人
闻**:登录了PQArt内核组件
高**:使用了INOVANCE-IR-R7H-70S5机器人
高**:使用了INOVANCE-IR-S35-80Z42S5机器人
硬**:登录了PQPanel板材切割编程软件
王**:登录了工厂仿真
 张**:登录了工厂仿真
张**:使用了CHL-DS-18工作站
嘉**:登录了工厂仿真
张**:登录了工厂仿真
张**:使用了CHL-DS-18工作站
嘉**:登录了工厂仿真
 潘**:登录了工厂仿真
潘**:登录了工厂仿真
 工**:登录了企业版
青**:登录了工厂仿真
工**:登录了企业版
青**:登录了工厂仿真
 沈**:登录了企业版
陈**:登录了企业版
沈**:登录了企业版
陈**:登录了企业版
 郭**:登录了工厂仿真
郭**:登录了企业版
郭**:登录了工厂仿真
郭**:登录了企业版
 崔**:登录了工厂仿真
崔**:使用了ZJDB设备库
学**:登录了工厂仿真
崔**:登录了工厂仿真
崔**:使用了ZJDB设备库
学**:登录了工厂仿真
 阿**:登录了竞赛版
阿**:使用了CHL-DS-03工作站
海**:登录了PQArt内核组件
夜**:登录了企业版
夜**:使用了ABB工作站
夜**:使用了ESTUN工作站
庄**:登录了企业版
杨**:登录了企业版
沪**:登录了沪钧机电专业版
云**:登录了工厂仿真
阿**:登录了竞赛版
阿**:使用了CHL-DS-03工作站
海**:登录了PQArt内核组件
夜**:登录了企业版
夜**:使用了ABB工作站
夜**:使用了ESTUN工作站
庄**:登录了企业版
杨**:登录了企业版
沪**:登录了沪钧机电专业版
云**:登录了工厂仿真
 长**:登录了工厂仿真
鲁**:使用了AUT-DWP-P-200机器人
鲁**:使用了CRP-RA15-12机器人
鲁**:使用了CRP-RH14-10-C机器人
鲁**:使用了CRP-RH21-06-W机器人
鲁**:使用了ERW500H ECO-22工具
成**:登录了PQArt内核组件
长**:登录了工厂仿真
鲁**:使用了AUT-DWP-P-200机器人
鲁**:使用了CRP-RA15-12机器人
鲁**:使用了CRP-RH14-10-C机器人
鲁**:使用了CRP-RH21-06-W机器人
鲁**:使用了ERW500H ECO-22工具
成**:登录了PQArt内核组件
 李**:登录了企业版
郭**:登录了工厂仿真
南**:登录了企业版
李**:登录了企业版
郭**:登录了工厂仿真
南**:登录了企业版
 唐**:登录了工厂仿真
唐**:登录了工厂仿真
 张**:登录了工厂仿真
李**:登录了PQArt内核组件
张**:登录了工厂仿真
李**:登录了PQArt内核组件
 刘**:登录了工厂仿真
田**:登录了工厂仿真
刘**:登录了工厂仿真
田**:登录了工厂仿真
 流**:登录了企业版
流**:使用了ABB工作站
c**:登录了工厂仿真
流**:登录了企业版
流**:使用了ABB工作站
c**:登录了工厂仿真
 赵**:登录了工厂仿真
赵**:使用了CHL-JC-11-A工作站
赵**:使用了LTCC设备库
赵**:使用了ZP设备库
赵**:登录了工厂仿真
赵**:使用了CHL-JC-11-A工作站
赵**:使用了LTCC设备库
赵**:使用了ZP设备库
 邓**:登录了企业版
邓**:学习了四川省“华航唯实杯”机器人虚拟仿真大赛
陈**:登录了工厂仿真
邓**:登录了企业版
邓**:学习了四川省“华航唯实杯”机器人虚拟仿真大赛
陈**:登录了工厂仿真
 曾**:登录了工厂仿真
埃**:使用了ER7-910-MI机器人
埃**:使用了ER8-720-MI机器人
魏**:登录了工厂仿真
曾**:登录了工厂仿真
埃**:使用了ER7-910-MI机器人
埃**:使用了ER8-720-MI机器人
魏**:登录了工厂仿真
 马**:登录了工厂仿真
a**:使用了AUBO-i20机器人
王**:登录了工厂仿真
R**:登录了工厂仿真
R**:使用了CHL-DS-01(A卷)工作站
R**:使用了CHL-DS-01工作站
R**:使用了CHL-KH11-Z1工作站
鸿**:登录了企业版
马**:登录了工厂仿真
a**:使用了AUBO-i20机器人
王**:登录了工厂仿真
R**:登录了工厂仿真
R**:使用了CHL-DS-01(A卷)工作站
R**:使用了CHL-DS-01工作站
R**:使用了CHL-KH11-Z1工作站
鸿**:登录了企业版
 陈**:登录了企业版
刘**:登录了工厂仿真
孙**:使用了INOVANCE-IR-R10H-120S5机器人
a**:使用了AUBO-i16机器人
李**:登录了工厂仿真
胡**:登录了企业版
常**:登录了企业版
无**:使用了ABB-IRB1200-5-90机器人
常**:登录了工厂仿真
杨**:登录了工厂仿真
杨**:使用了CHL-DS-18工作站
杨**:使用了CHL-GV-01T设备库
杨**:使用了CHL-JC-11工作站
杨**:使用了CHL-WL-01R工作站
杨**:使用了CHL-WL-02工作站
杨**:使用了智能仓储单元 3D工作站
周**:登录了工厂仿真
申**:登录了企业版
咕**:使用了CRP-RA18-20-J 机器人
常**:登录了企业版
陈**:登录了企业版
刘**:登录了工厂仿真
孙**:使用了INOVANCE-IR-R10H-120S5机器人
a**:使用了AUBO-i16机器人
李**:登录了工厂仿真
胡**:登录了企业版
常**:登录了企业版
无**:使用了ABB-IRB1200-5-90机器人
常**:登录了工厂仿真
杨**:登录了工厂仿真
杨**:使用了CHL-DS-18工作站
杨**:使用了CHL-GV-01T设备库
杨**:使用了CHL-JC-11工作站
杨**:使用了CHL-WL-01R工作站
杨**:使用了CHL-WL-02工作站
杨**:使用了智能仓储单元 3D工作站
周**:登录了工厂仿真
申**:登录了企业版
咕**:使用了CRP-RA18-20-J 机器人
常**:登录了企业版
 杨**:登录了工厂仿真
力**:使用了INOVANCE-IR-S10-60Z20S3机器人
力**:使用了INOVANCE-IR-S7-60Z20S3机器人
羽**:登录了企业版
羽**:使用了FANUC工作站
羽**:使用了数控数字化平台工作站
橙**:登录了工厂仿真
橙**:使用了FRANKA_Hand_movable工具
常**:登录了企业版
安**:使用了CRP-RH18-20-W机器人
w**:登录了工厂仿真
代**:登录了工厂仿真
杨**:登录了工厂仿真
力**:使用了INOVANCE-IR-S10-60Z20S3机器人
力**:使用了INOVANCE-IR-S7-60Z20S3机器人
羽**:登录了企业版
羽**:使用了FANUC工作站
羽**:使用了数控数字化平台工作站
橙**:登录了工厂仿真
橙**:使用了FRANKA_Hand_movable工具
常**:登录了企业版
安**:使用了CRP-RH18-20-W机器人
w**:登录了工厂仿真
代**:登录了工厂仿真
 黄**:登录了工厂仿真
王**:登录了工厂仿真
王**:使用了ABB-IRB120机器人
王**:使用了HXCC设备库
黄**:登录了工厂仿真
王**:登录了工厂仿真
王**:使用了ABB-IRB120机器人
王**:使用了HXCC设备库
 s**:登录了企业版
s**:使用了Kawasaki-KJ314(body)机器人
王**:登录了PQArt内核组件
赵**:登录了工厂仿真
赵**:使用了CC设备库
赵**:使用了CHL-DS-01工作站
赵**:使用了CHL-DS-03工作站
赵**:使用了CHL-KH11-G4工作站
赵**:使用了JC设备库
赵**:使用了JGZX设备库
赵**:使用了ZJDB设备库
赵**:使用了ZP设备库
赵**:使用了定制工作站
A**:登录了工厂仿真
崔**:使用了AUBO-i16机器人
崔**:使用了AUBO-i20机器人
蔡**:登录了企业版
s**:登录了企业版
s**:使用了Kawasaki-KJ314(body)机器人
王**:登录了PQArt内核组件
赵**:登录了工厂仿真
赵**:使用了CC设备库
赵**:使用了CHL-DS-01工作站
赵**:使用了CHL-DS-03工作站
赵**:使用了CHL-KH11-G4工作站
赵**:使用了JC设备库
赵**:使用了JGZX设备库
赵**:使用了ZJDB设备库
赵**:使用了ZP设备库
赵**:使用了定制工作站
A**:登录了工厂仿真
崔**:使用了AUBO-i16机器人
崔**:使用了AUBO-i20机器人
蔡**:登录了企业版
 董**:登录了企业版
董**:学习了四川省“华航唯实杯”机器人虚拟仿真大赛
上**:登录了PQArt内核组件
s**:登录了企业版
广**:登录了企业版
常**:登录了企业版
K**:使用了VCC30-1800机器人
U**:登录了工厂仿真
成**:登录了PQArt内核组件
S**:登录了工厂仿真
董**:登录了企业版
董**:学习了四川省“华航唯实杯”机器人虚拟仿真大赛
上**:登录了PQArt内核组件
s**:登录了企业版
广**:登录了企业版
常**:登录了企业版
K**:使用了VCC30-1800机器人
U**:登录了工厂仿真
成**:登录了PQArt内核组件
S**:登录了工厂仿真
 王**:登录了工厂仿真
东**:登录了企业版
7**:登录了工厂仿真
7**:使用了CHL-DS-18工作站
7**:使用了配天工作站
王**:登录了工厂仿真
东**:登录了企业版
7**:登录了工厂仿真
7**:使用了CHL-DS-18工作站
7**:使用了配天工作站
 赵**:登录了工厂仿真
照**:登录了企业版
胡**:登录了埃夫特专属版
胡**:使用了EFORT-ER25-1800机器人
张**:登录了PQArt内核组件
孙**:登录了企业版
孙**:使用了AUBO-i10机器人
S**:登录了工厂仿真
S**:使用了KUKA-KR120-R2500-pro机器人
S**:使用了KUKA-KR22-R1610机器人
S**:使用了KUKA-KR25-R1840-3-HW机器人
S**:使用了KUKA-KR60-L45-HA机器人
S**:使用了KUKA-KR6-R700-sixx机器人
杨**:登录了企业版
赵**:登录了工厂仿真
照**:登录了企业版
胡**:登录了埃夫特专属版
胡**:使用了EFORT-ER25-1800机器人
张**:登录了PQArt内核组件
孙**:登录了企业版
孙**:使用了AUBO-i10机器人
S**:登录了工厂仿真
S**:使用了KUKA-KR120-R2500-pro机器人
S**:使用了KUKA-KR22-R1610机器人
S**:使用了KUKA-KR25-R1840-3-HW机器人
S**:使用了KUKA-KR60-L45-HA机器人
S**:使用了KUKA-KR6-R700-sixx机器人
杨**:登录了企业版
 李**:登录了工厂仿真
卓**:使用了INOVANCE-IR-R60-210S5机器人
李**:登录了工厂仿真
卓**:使用了INOVANCE-IR-R60-210S5机器人
 常**:登录了企业版
常**:登录了企业版
 不**:登录了企业版
不**:使用了ESTUN工作站
魏**:登录了工厂仿真
卓**:登录了教育版
不**:登录了企业版
不**:使用了ESTUN工作站
魏**:登录了工厂仿真
卓**:登录了教育版
 p**:登录了工厂仿真
杜**:登录了工厂仿真
党**:登录了工厂仿真
t**:登录了工厂仿真
章**:登录了企业版
华**:登录了PQArt内核组件
盛**:登录了埃夫特专属版
盛**:使用了EFORT-ER15-1400机器人
何**:登录了PQArt内核组件
X**:登录了工厂仿真
p**:登录了工厂仿真
杜**:登录了工厂仿真
党**:登录了工厂仿真
t**:登录了工厂仿真
章**:登录了企业版
华**:登录了PQArt内核组件
盛**:登录了埃夫特专属版
盛**:使用了EFORT-ER15-1400机器人
何**:登录了PQArt内核组件
X**:登录了工厂仿真
 S**:登录了企业版
杨**:登录了工厂仿真
S**:登录了企业版
杨**:登录了工厂仿真
 黄**:登录了工厂仿真
黄**:登录了工厂仿真
 张**:登录了企业版
张**:登录了企业版
 季**:登录了工厂仿真
季**:使用了OMRON FZ-SC2M设备库
季**:使用了OMR-SEN-E3Z-LS81-2M设备库
季**:登录了工厂仿真
季**:使用了OMRON FZ-SC2M设备库
季**:使用了OMR-SEN-E3Z-LS81-2M设备库
 张**:登录了工厂仿真
张**:登录了工厂仿真
 梁**:登录了工厂仿真
梁**:使用了(中级:B卷)工作站
梁**:登录了工厂仿真
梁**:使用了(中级:B卷)工作站
 王**:登录了工厂仿真
无**:登录了工厂仿真
无**:使用了ELTE-EC63机器人
常**:登录了企业版
霍**:登录了教育版
赵**:登录了工厂仿真
王**:登录了工厂仿真
无**:登录了工厂仿真
无**:使用了ELTE-EC63机器人
常**:登录了企业版
霍**:登录了教育版
赵**:登录了工厂仿真
 马**:登录了工厂仿真
马**:使用了CHL-DS-18工作站
马**:登录了工厂仿真
马**:使用了CHL-DS-18工作站
 张**:登录了工厂仿真
张**:使用了CHL-DS-18工作站
张**:登录了工厂仿真
张**:使用了CHL-DS-18工作站
 张**:登录了企业版
常**:登录了企业版
张**:登录了企业版
常**:登录了企业版
 王**:登录了竞赛版
王**:使用了CHL-KH11(STEP)工作站
埃**:使用了ER8-720-MI机器人
徐**:登录了工厂仿真
王**:登录了竞赛版
王**:使用了CHL-KH11(STEP)工作站
埃**:使用了ER8-720-MI机器人
徐**:登录了工厂仿真
 秦**:登录了工厂仿真
秦**:使用了CHL-DS-18工作站
嘉**:登录了工厂仿真
k**:登录了PQArt内核组件
S**:登录了工厂仿真
S**:使用了CHL-KH11(KUKA)工作站
S**:使用了CHL-KH11-G3工作站
安**:登录了竞赛版
秦**:登录了工厂仿真
秦**:使用了CHL-DS-18工作站
嘉**:登录了工厂仿真
k**:登录了PQArt内核组件
S**:登录了工厂仿真
S**:使用了CHL-KH11(KUKA)工作站
S**:使用了CHL-KH11-G3工作站
安**:登录了竞赛版
 耿**:登录了工厂仿真
耿**:登录了工厂仿真
 L**:登录了工厂仿真
傻**:登录了企业版
L**:登录了工厂仿真
傻**:登录了企业版
 刘**:登录了企业版
刘**:登录了企业版
 刘**:登录了工厂仿真
刘**:使用了CHL-KH11(ABB)工作站
刘**:使用了OMRON FZ-SC2M设备库
刘**:登录了企业版
刘**:登录了工厂仿真
刘**:使用了CHL-KH11(ABB)工作站
刘**:使用了OMRON FZ-SC2M设备库
刘**:登录了企业版
 凡**:使用了BRTIRUS1820A机器人
沈**:登录了PQArt内核组件
照**:登录了企业版
史**:登录了PQArt内核组件
凡**:使用了BRTIRUS1820A机器人
沈**:登录了PQArt内核组件
照**:登录了企业版
史**:登录了PQArt内核组件
 赖**:登录了工厂仿真
赖**:学习了2023年“华航杯”工业机器人虚拟仿真竞赛
赖**:学习了工业机器人集成应用基础课——工业机器人系统集成与应用(虚拟仿真部分)
长**:登录了PQArt内核组件
d**:登录了企业版
赖**:登录了工厂仿真
赖**:学习了2023年“华航杯”工业机器人虚拟仿真竞赛
赖**:学习了工业机器人集成应用基础课——工业机器人系统集成与应用(虚拟仿真部分)
长**:登录了PQArt内核组件
d**:登录了企业版
 姚**:登录了工厂仿真
姚**:使用了ABB-IRB120机器人
姚**:登录了工厂仿真
姚**:使用了ABB-IRB120机器人
 风**:登录了企业版
华**:登录了PQArt内核组件
风**:登录了企业版
华**:登录了PQArt内核组件
 吴**:登录了工厂仿真
吴**:登录了埃夫特专属版
王**:登录了企业版
李**:使用了INOVANCE-IR-R220-270S7机器人
吴**:登录了工厂仿真
吴**:登录了埃夫特专属版
王**:登录了企业版
李**:使用了INOVANCE-IR-R220-270S7机器人
 潘**:登录了工厂仿真
汇**:使用了INOVANCE-IR-R16-210S5机器人
汇**:使用了INOVANCE-IR-R50-250S7机器人
汇**:使用了INOVANCE-IR-R7H-70S5机器人
汇**:使用了INOVANCE-IRS111-10-80Z30TS3机器人
汇**:使用了INOVANCE-IR-S35-100Z42S5机器人
汇**:使用了INOVANCE-IR-S35-80Z42S5机器人
汇**:使用了INOVANCE-IR-S4-40Z15S3机器人
汇**:使用了INOVANCE-IR-S7-50Z20S3机器人
G**:登录了工厂仿真
任**:登录了企业版
潘**:登录了工厂仿真
汇**:使用了INOVANCE-IR-R16-210S5机器人
汇**:使用了INOVANCE-IR-R50-250S7机器人
汇**:使用了INOVANCE-IR-R7H-70S5机器人
汇**:使用了INOVANCE-IRS111-10-80Z30TS3机器人
汇**:使用了INOVANCE-IR-S35-100Z42S5机器人
汇**:使用了INOVANCE-IR-S35-80Z42S5机器人
汇**:使用了INOVANCE-IR-S4-40Z15S3机器人
汇**:使用了INOVANCE-IR-S7-50Z20S3机器人
G**:登录了工厂仿真
任**:登录了企业版
 雷**:登录了竞赛版
雷**:登录了竞赛版
 Y**:登录了工厂仿真
张**:登录了工厂仿真
吴**:登录了企业版
吴**:使用了EFORT-ARC12-2000机器人
曾**:登录了企业版
Y**:登录了工厂仿真
张**:登录了工厂仿真
吴**:登录了企业版
吴**:使用了EFORT-ARC12-2000机器人
曾**:登录了企业版
 魏**:登录了埃夫特专属版
罗**:使用了ABB-IRB120机器人
罗**:使用了FANUC-M-10iD-10L机器人
罗**:使用了FANUC-M-10iD-12机器人
罗**:使用了KUKA-KR480-R3330-MT机器人
罗**:使用了LaserTool工具
罗**:使用了ROKAE-NB12-12/1.4机器人
罗**:使用了ROKAE-NB12h-12/1.4机器人
罗**:使用了ROKAE-XB7XLh R1206机器人
罗**:使用了ROKAE-xMate CR12 R1300(手腕缩短)机器人
罗**:使用了ROKAE-xMate CR12 R1300机器人
罗**:使用了ToolB工具
吴**:登录了工厂仿真
吴**:使用了CHL-JC-08工作站
庄**:登录了工厂仿真
于**:登录了工厂仿真
沈**:登录了企业版
傅**:登录了企业版
魏**:登录了埃夫特专属版
罗**:使用了ABB-IRB120机器人
罗**:使用了FANUC-M-10iD-10L机器人
罗**:使用了FANUC-M-10iD-12机器人
罗**:使用了KUKA-KR480-R3330-MT机器人
罗**:使用了LaserTool工具
罗**:使用了ROKAE-NB12-12/1.4机器人
罗**:使用了ROKAE-NB12h-12/1.4机器人
罗**:使用了ROKAE-XB7XLh R1206机器人
罗**:使用了ROKAE-xMate CR12 R1300(手腕缩短)机器人
罗**:使用了ROKAE-xMate CR12 R1300机器人
罗**:使用了ToolB工具
吴**:登录了工厂仿真
吴**:使用了CHL-JC-08工作站
庄**:登录了工厂仿真
于**:登录了工厂仿真
沈**:登录了企业版
傅**:登录了企业版
 周**:登录了企业版
周**:使用了SRT12A-14机器人
周**:使用了ToolB工具
周**:学习了PQArt实用功能视频讲解
李**:使用了TOPSTAR-TRH005-800-200机器人
周**:登录了埃夫特专属版
博**:登录了企业版
周**:登录了企业版
周**:使用了SRT12A-14机器人
周**:使用了ToolB工具
周**:学习了PQArt实用功能视频讲解
李**:使用了TOPSTAR-TRH005-800-200机器人
周**:登录了埃夫特专属版
博**:登录了企业版
 平**:登录了工厂仿真
平**:登录了工厂仿真
 黄**:登录了工厂仿真
黄**:使用了CHL-DS-18工作站
流**:登录了企业版
杨**:登录了企业版
杨**:使用了ABB工作站
s**:登录了教育版
李**:登录了工厂仿真
黄**:登录了工厂仿真
黄**:使用了CHL-DS-18工作站
流**:登录了企业版
杨**:登录了企业版
杨**:使用了ABB工作站
s**:登录了教育版
李**:登录了工厂仿真
 廖**:登录了竞赛版
廖**:使用了CHL-DS-01工作站
廖**:登录了竞赛版
廖**:使用了CHL-DS-01工作站
 廖**:登录了工厂仿真
廖**:使用了CHL-DS-18工作站
开**:登录了PQArt内核组件
廖**:登录了工厂仿真
廖**:使用了CHL-DS-18工作站
开**:登录了PQArt内核组件
 陈**:学习了PLC编程案例分享
陈**:学习了Python与工业自动化
陈**:学习了工业机器人操作技巧
陈**:学习了PLC编程案例分享
陈**:学习了Python与工业自动化
陈**:学习了工业机器人操作技巧
 S**:登录了教育版
S**:登录了竞赛版
S**:使用了ABB-IRB120机器人
S**:使用了CHL-DS-01工作站
S**:使用了CHL-KH11(ABB)工作站
S**:登录了教育版
S**:登录了竞赛版
S**:使用了ABB-IRB120机器人
S**:使用了CHL-DS-01工作站
S**:使用了CHL-KH11(ABB)工作站
 殷**:登录了工厂仿真
长**:登录了PQArt内核组件
殷**:登录了工厂仿真
长**:登录了PQArt内核组件









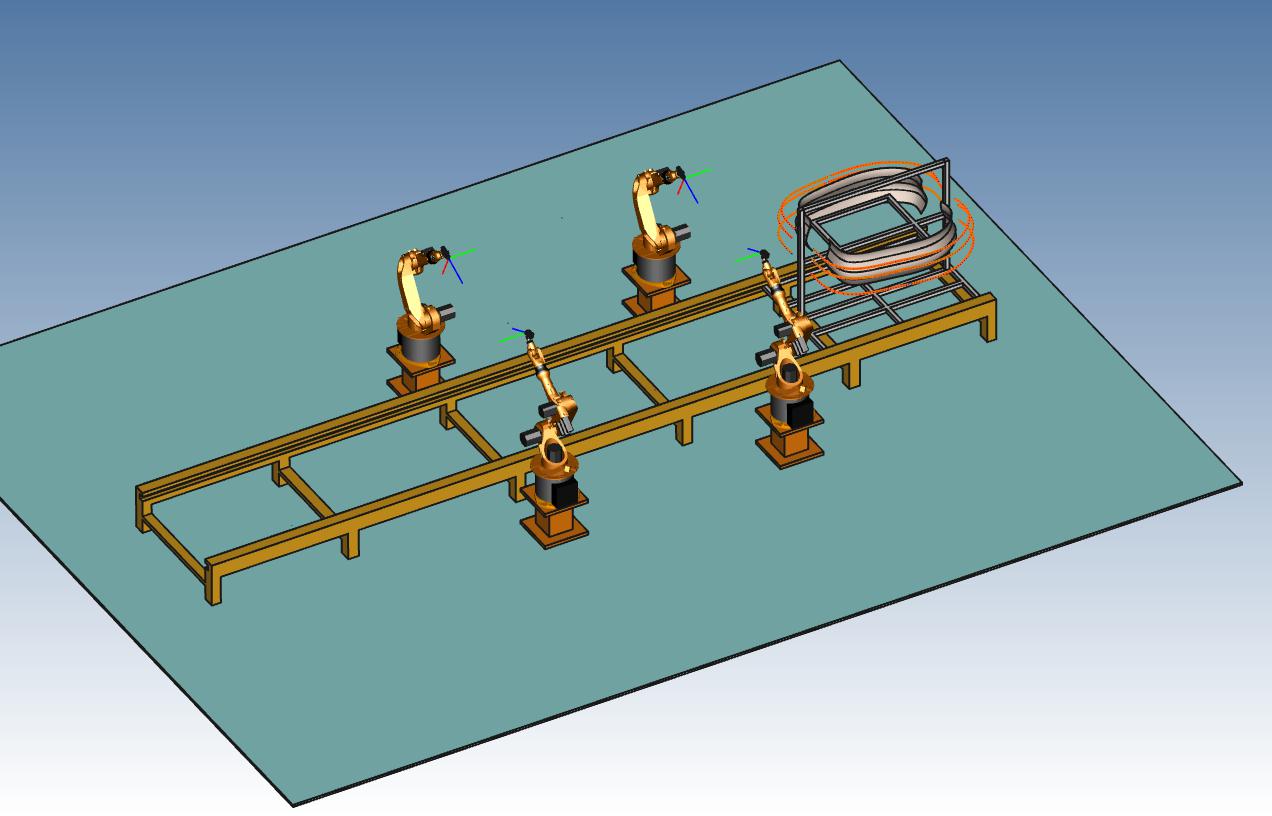
机器人全自动化焊接系统,是一个完整、较为成熟机器人加工流程。目前被广泛应用、汽车制造、轮船制造、钢构件焊接等领域。鉴于所加工件的复杂度、或者体谅大小,一般会给机器人配套变位机或者导轨、特殊的焊枪等设备,本视频主要展示是“机器人+变位机”这种工作情形下机器人焊接加工场景。该套系统包括:机器人本体、变位机、焊枪、清枪器、清枪站等,可以实现对复杂焊接件的连续顺畅、自动化焊接。
 金刚葫芦娃
金刚葫芦娃
喷涂,是工业自动化生产中,工业机器人使用的一个常用的工作方式。传统的喷涂作业,工作工况很恶劣,严重影响工作人员的身心健康,并且喷涂质量和工人师傅的工作经验,手感、观感有很多关系,会造成喷涂质量侧次不齐。 利用机器人,特别是多机器人协同喷涂,加上必要的密封措施,一方面:减少对环境的污染;另一方面喷涂质量品质如一;工作效率成倍提高。 机器人喷涂作业已经广泛应用于,大型器件外边处理、汽车生产等领域。
金刚葫芦娃
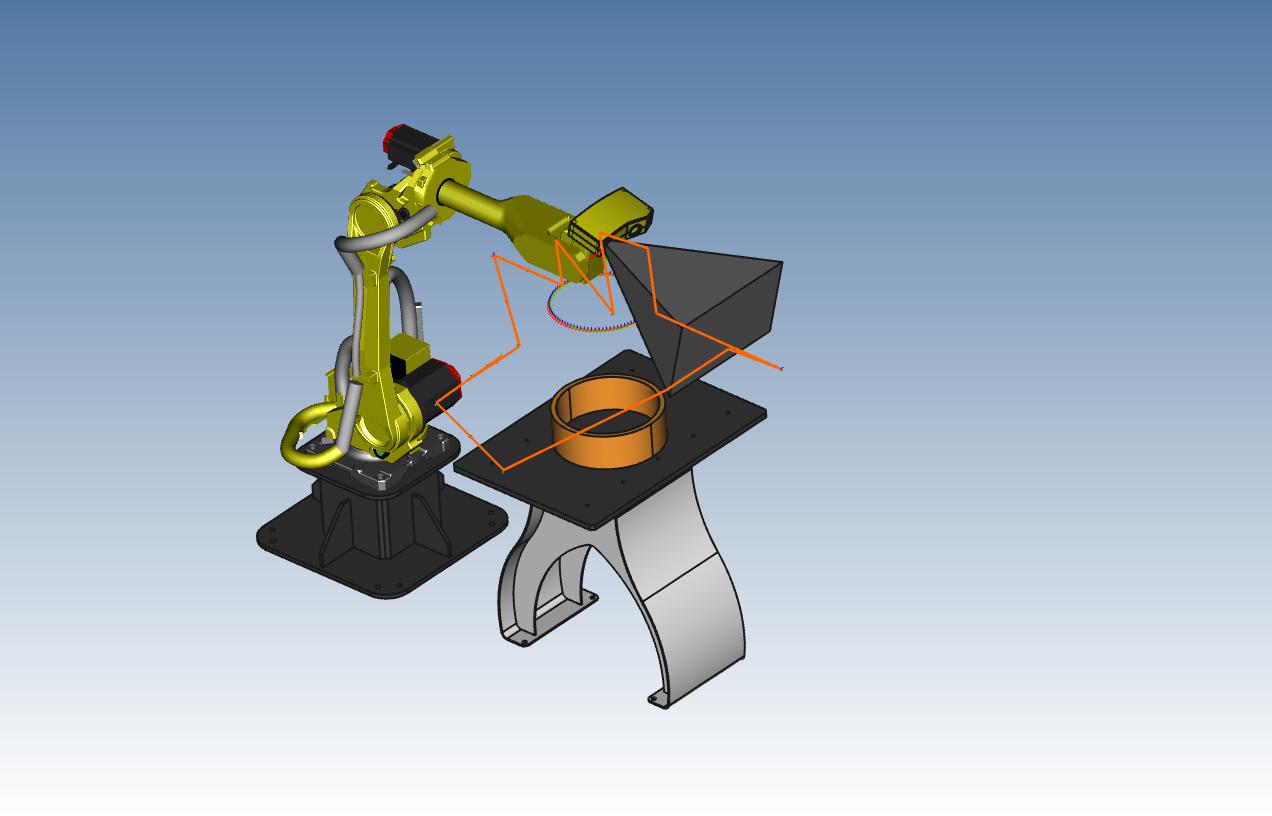
工业机器人3D检测、扫描:采用FANUC-R 0iB机器人、借助3D CaMega CP300 测量系统,对一些复杂的工业零部件进行3D扫描。 扫描结果:一方面可以后续借助3D 打印设备,直接将其打印成型(增材制造);另一方面,可以将扫描点云数据,借助专业的点云处理软件,将其实体化,然后导入3D软件进一步改进后,生成图纸,进行后续的生产制造(减材制造)。
金刚葫芦娃
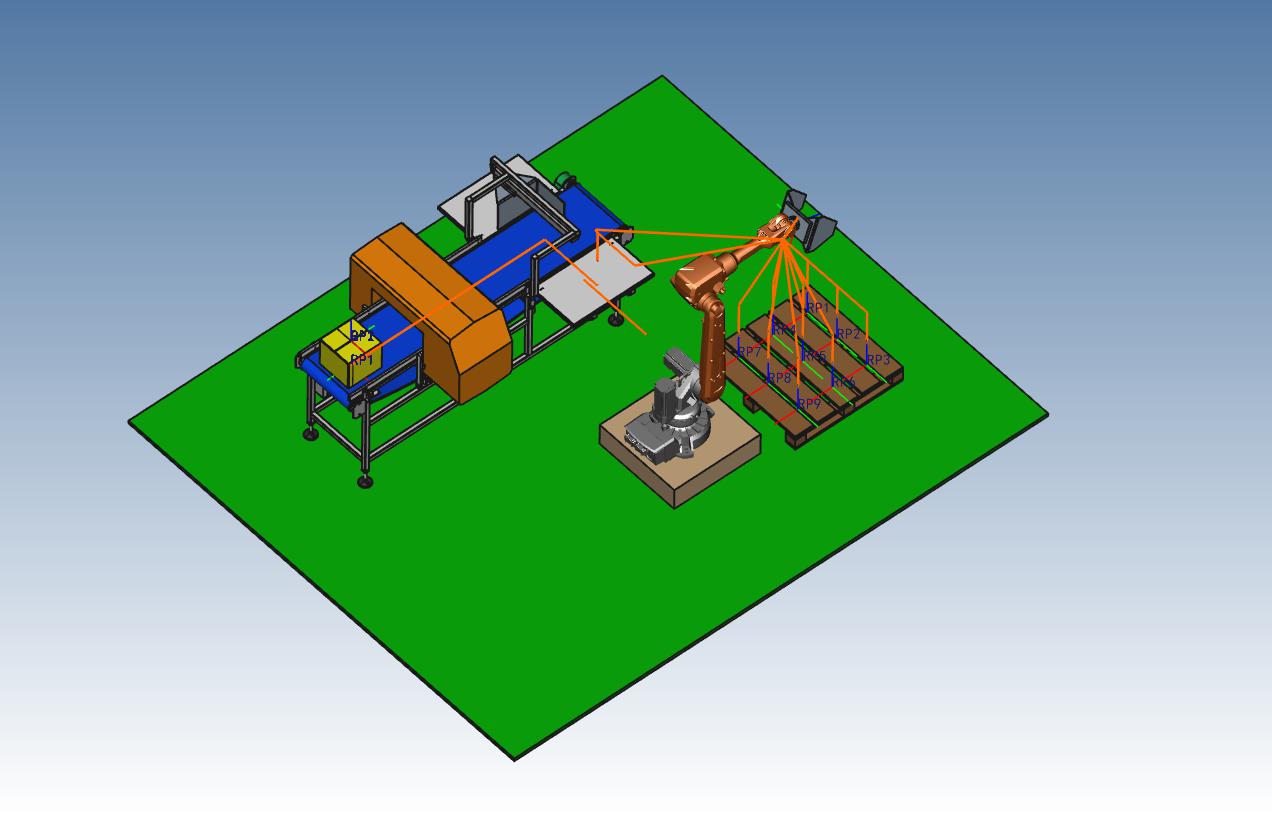
本视频只是简单展示一下机器人在自动化包装线上的上下料,码垛等代替人工的工作情形。包装流水线上专门有颗粒物灌装、外包装包裹、自动化封边u等专有设备,部分这类设备有些严格是一些特殊机构(机器人严格上说是机构的一种),起始或完成阶段,会有机器人参与上下料或者码垛、拆剁的工艺流程设计安排。
金刚葫芦娃
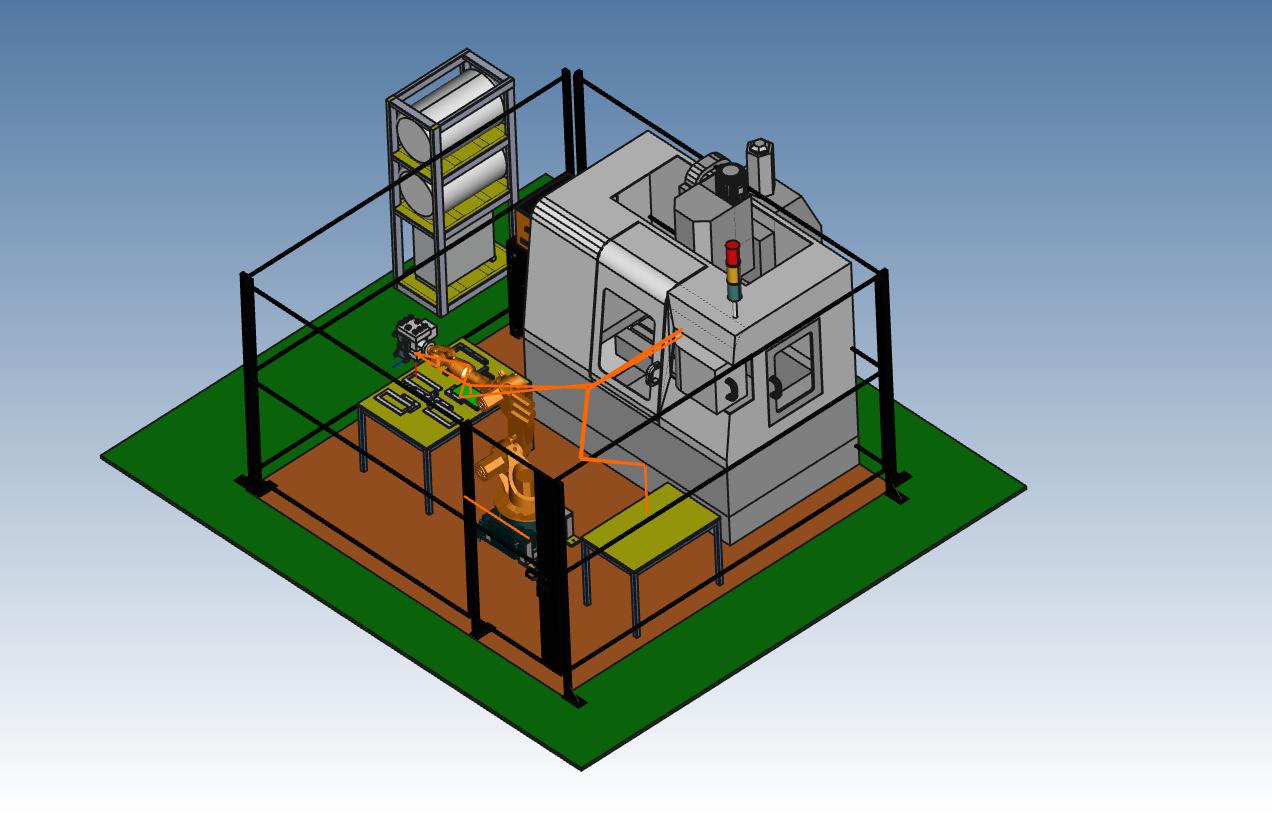
数控加工,这些繁杂、重复、危险性的工作, 每次需要人工上下料,同时操作数控机床的运行与暂停,对工人操作规范要求高、且工作繁琐、工种危险性也很大,稍不注意会对操作人员的肢体造成永久伤害。这种工序固定,有固定工作节拍的工种,比较适合用机器人来代替人工作业,具有工作效率高,精度高,可以二十四小时连续工作等特点,经济效益好。
金刚葫芦娃

核心技术 自主可控
机器人高端应用必备工具
已服务10万+用户
自主可控的智能产线数字孪生软件
海量在线设备库
百万级大场景设计与仿真
可连接实物与虚拟PLC,开展虚拟调试























 010-89755166转810
010-89755166转810


